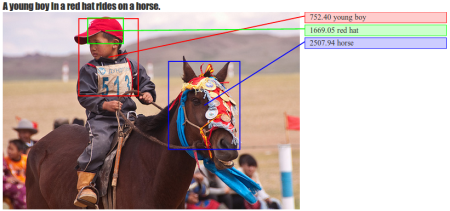
We train a multi-modal embedding to associate fragments of images (objects) and sentences (noun and verb phrases) with a structured, max-margin objective. Our model enables efficient and interpretible retrieval of images from sentence descriptions (and vice versa).
Kategori: Makaleler
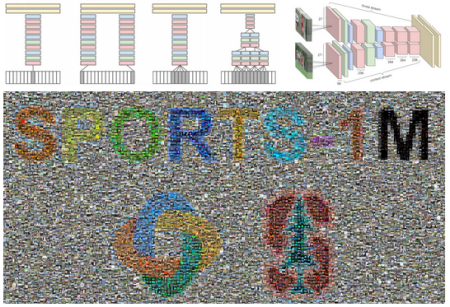
Makale: Large-Scale Video Classification with Convolutional Neural Networks
We introduce Sports-1M: a dataset of 1.1 million YouTube videos with 487 classes of Sport. This dataset allowed us to train large Convolutional Neural Networks that learn spatio-temporal features from video rather than single, static images.
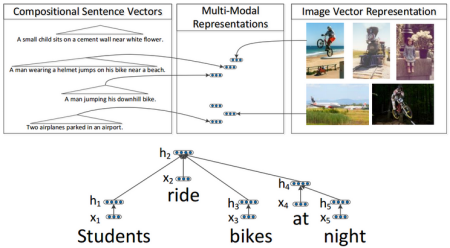
Makale: Grounded Compositional Semantics for Finding and Describing Images with Sentences
Our model learns to associate images and sentences in a common We use a Recursive Neural Network to compute representation for sentences and a Convolutional Neural Network for images. We then learn a model that associates images and sentences through a structured, max-margin objective.
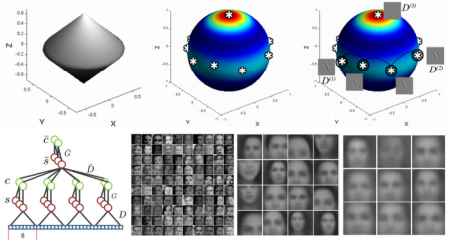
Makale: Emergence of Object-Selective Features in Unsupervised Feature Learning
We introduce an unsupervised feature learning algorithm that is trained explicitly with k-means for simple cells and a form of agglomerative clustering for complex cells. When trained on a large dataset of YouTube frames, the algorithm automatically discovers semantic concepts, such as faces.
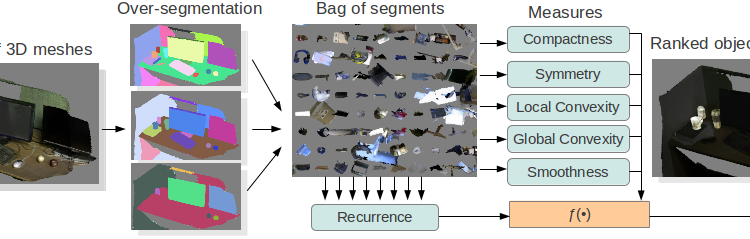
Makale: Object Discovery in 3D scenes via Shape Analysis
We present a method for discovering object models from 3D meshes of indoor environments. Our algorithm first decomposes the scene into a set of candidate mesh segments and then ranks each segment according to its “objectness” — a quality that distinguishes objects from clutter. To do so, we propose five intrinsic shape measures: compactness, symmetry, smoothness, and local and global convexity. We additionally propose a recurrence measure, codifying the intuition that frequently occurring geometries are more likely to correspond to complete objects. We evaluate our method in both supervised and unsupervised regimes on a dataset of 58 indoor scenes collected using an Open Source implementation of Kinect Fusion. We show that our approach can reliably and efficiently distinguish objects from clutter, with Average Precision score of .92. We make our dataset available to the public.